7. Examples#
Here is an example of a very simple program that makes the robot’s TCP follow a square
path, using the MoveLin command:
// Activate and home the robot
ActivateRobot
Home
// Move to zero position
MoveJoints(0,0,0,0,0,0)
// Move to starting position
MovePose(140,-100,250,0,90,0)
// Perform a square motion
MoveLin(140,100,250,0,90,0)
MoveLin(270,100,250,0,90,0)
MoveLin(270,-100,250,0,90,0)
MoveLin(140,-100,250,0,90,0)
// Move back to zero position
MoveJoints(0,0,0,0,0,0)
Figure 37 shows the result of four of the motion commands.
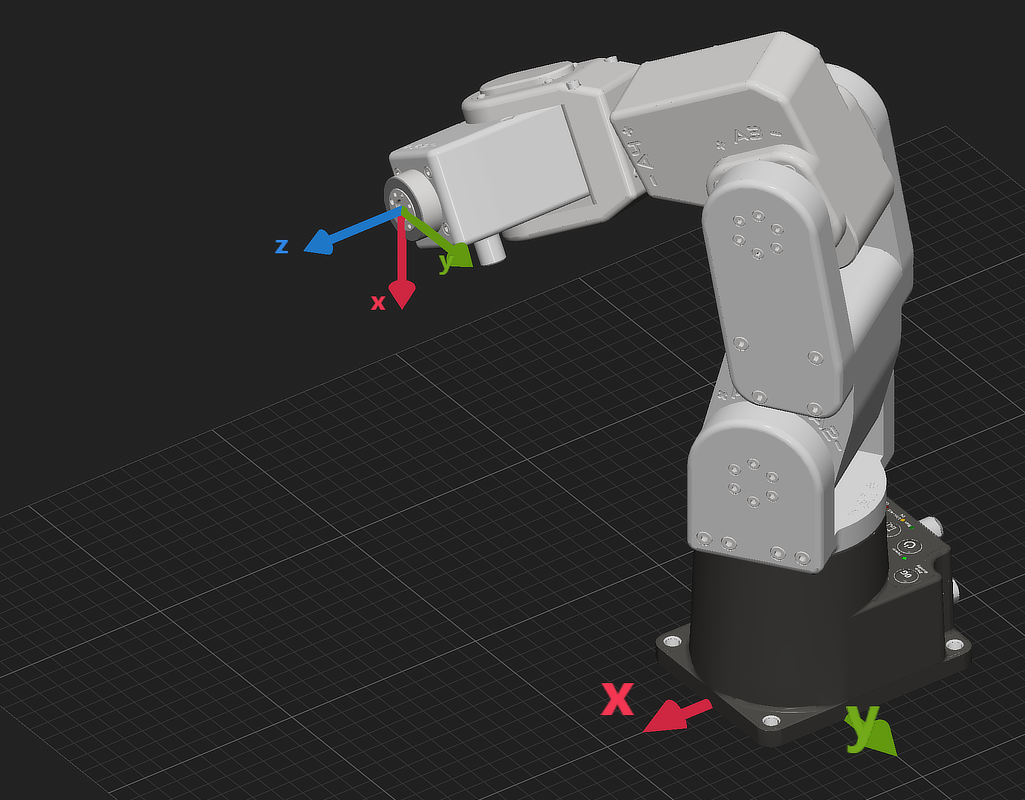 (a) MovePose(140,-100,250,0,90,0)
(a) MovePose(140,-100,250,0,90,0)
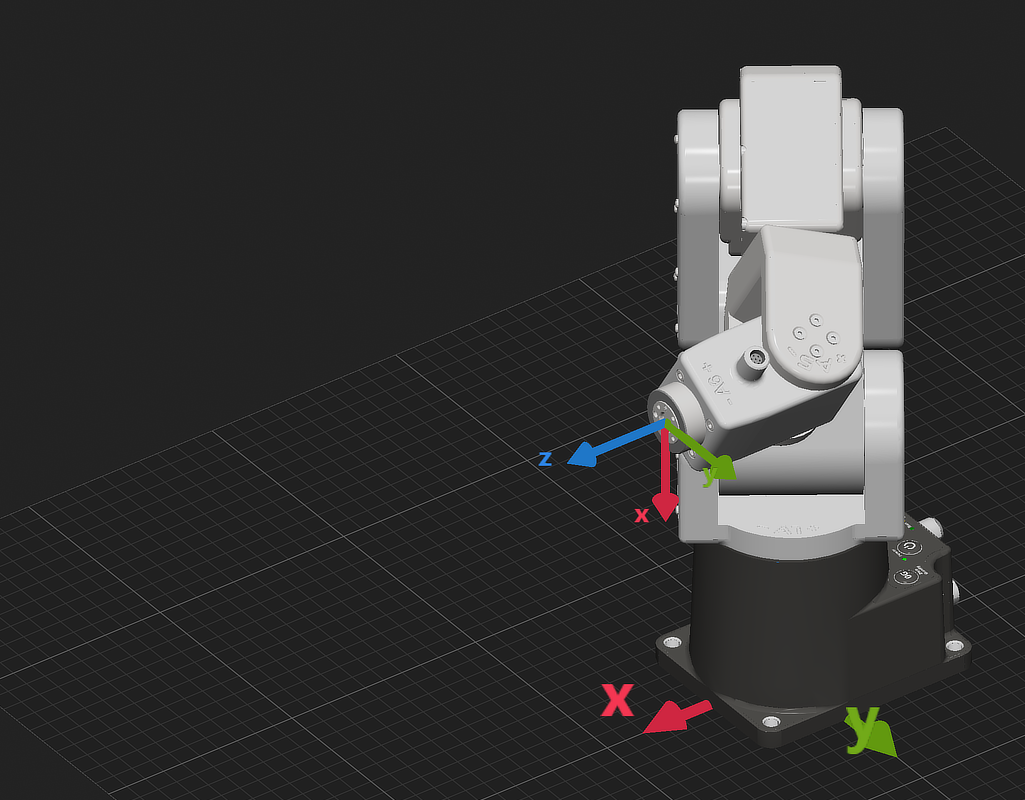 (b) MoveLin(270,100,250,0,90,0)
(b) MoveLin(270,100,250,0,90,0)
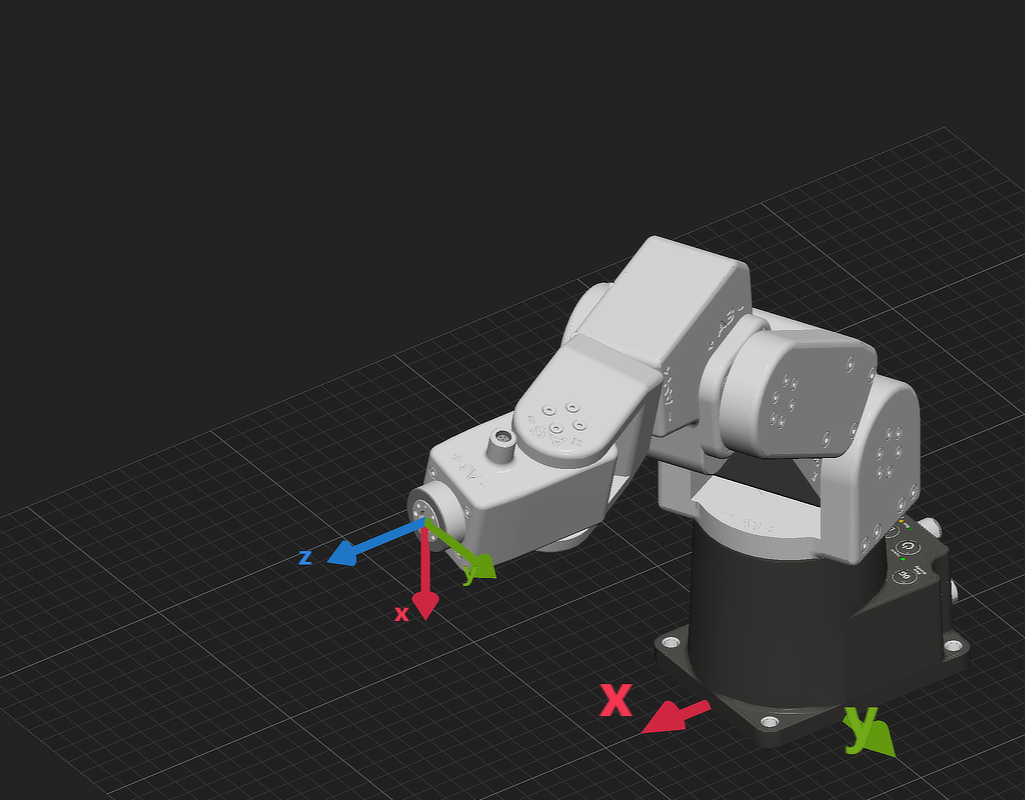 (c) MoveLin(270,-100,250,0,90,0)
(c) MoveLin(270,-100,250,0,90,0)
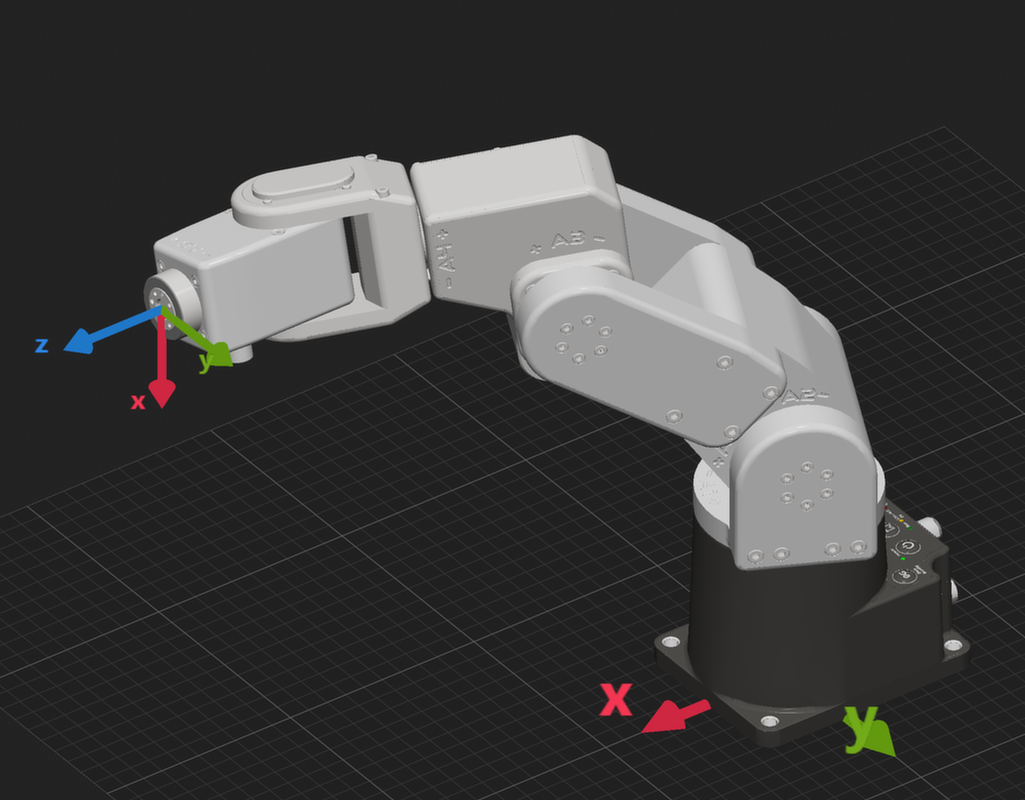 (d) MoveLin(140,-100,250,0,90,0)
(d) MoveLin(140,-100,250,0,90,0)
Figure 37 The four separate robot positions that define the motion sequence#